CN


加工轨迹仿真
在虚拟环境中精准模拟和优化机器人、CNC等设备的运动路径,确保加工精度、避免碰撞并最大化运行效率
-
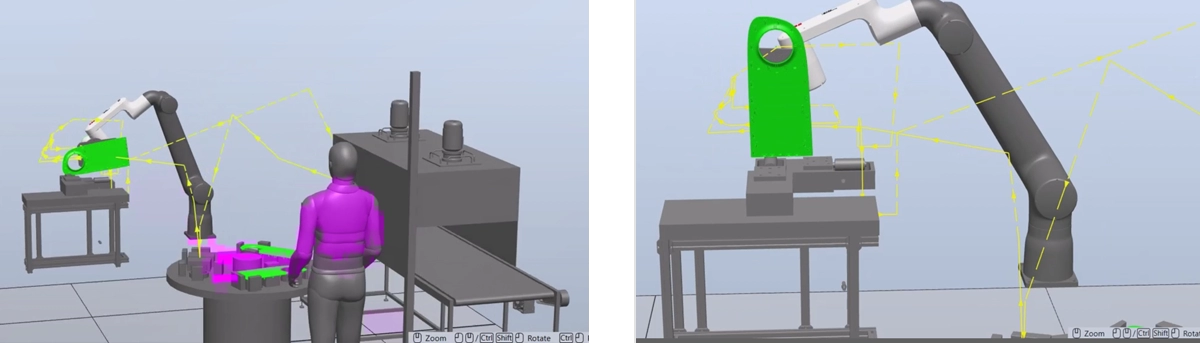
高精度离线编程与轨迹验证
基于工件的三维CAD模型,直接在仿真软件中生成机器人焊接、涂胶、激光加工等任务的运动轨迹,消除传统示教的时间浪费和对生产线的占用,轨迹定位精度可达±0.1mm。
-
复杂运动优化与节拍分析
对生成的轨迹进行平滑性、可达性及奇异性分析,自动优化关键路径点,消除不必要的轴运动,缩短空跑时间,从而压缩整体加工周期,提升设备OEE(综合设备效率)。
-
工装与环境碰撞检测
在虚拟环境中构建完整的工装夹具、周边设备及安全围栏模型,对机器人的整个运动过程进行毫米级精度的静态与动态干涉检查,提前预警并解决潜在的碰撞风险,保障设备安全。